Media Summary: Find all of my other videos here: Get the map of control theory: ... Writeup of this project at: Real-time Accelerometer ... Part 2 of sensor fusion video series showing theory and implementation of the
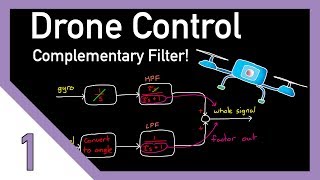
Complementary Filter - Detailed Analysis & Overview
Find all of my other videos here: Get the map of control theory: ... Writeup of this project at: Real-time Accelerometer ... Part 2 of sensor fusion video series showing theory and implementation of the Mocap Suit Building Part 10 In this video, I have explained ... Filter Tech Talks: Drone Control and the Attitude estimation (roll and pitch angle) using MPU-6050 (6 DOF IMU). Comparing various parameter values of both the ...
Lecture Series on Control Engineering by Prof. Ramkrishna Pasumarthy, Department of Electrical Engineering, IIT Madras and Dr. This is part of my guide on how to use a gyro and a accelerometer with a Arduino. More info can be found here: ... Kalman Filtering of 6-axis Accelerometer Signal In this lesson then we're going to apply the This video shows the mathematics behind the need for '