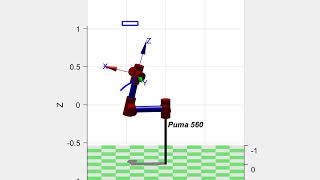
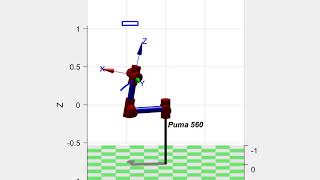
Media Summary: Part of our on-going research in the laboratory is to develop robust and practical Simulation of CVPC using PUMA 560 with uncertainty and modeling error ( This lecture provides an overview of model
Conjugated Visual Predictive Control Second - Detailed Analysis & Overview
Part of our on-going research in the laboratory is to develop robust and practical Simulation of CVPC using PUMA 560 with uncertainty and modeling error ( This lecture provides an overview of model Simulation of CVPC using PUMA 560 with uncertainty ( Simulation of CVPC using PUMA 560 with uncertainty and modeling error (First view, Intersections between Control, Learning and Optimization 2020 "Learning-based Model
This video accompanies the paper "Generative Lecture by Professor Stephen Boyd for Convex Optimization Deep Learning Based Affine Predictors for Model In order to improve the autonomy of the Biomimetic Sphere Robot (BSR), this paper studied the underwater trajectory tracking ...