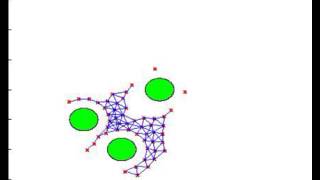
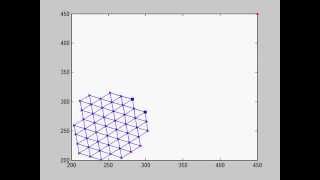
Media Summary: This video shows an experimental validation of rigidity-based kinematic translational maneuvering Multi-Agent Dynamic System (Flocking with Obstacles) Event Triggered Communication Mechanism for Distributed Flocking Control of Nonholonomic Multi agent
Flocking Control Of Multi Agent - Detailed Analysis & Overview
This video shows an experimental validation of rigidity-based kinematic translational maneuvering Multi-Agent Dynamic System (Flocking with Obstacles) Event Triggered Communication Mechanism for Distributed Flocking Control of Nonholonomic Multi agent All robots are first programed to go to the rendezvous point based on normal This video shows a comparison between formation In this video, the plot is updated in every movement cycle of the
Quanser YOUser Webinar - Compared to a single-agent system, [TASE] Safety-Critical Multi-Agent Flocking via Motion-Aware Control Barrier Functions ARISTOTLE UNIVERSITY of THESSALONIKI FACULTY of ENGINEERING SCHOOL of ELECTRICAL & COMPUTER ...














![[TASE] Safety-Critical Multi-Agent Flocking via Motion-Aware Control Barrier Functions](https://i.ytimg.com/vi/nlTR3_F28ms/mqdefault.jpg)
