Media Summary: F. Kerestecioğlu and A. Cezayirli (2013). A non-communicating multi- A talk in STAEOnline seminar series. For more information and the slides see ... The fitness functions only rewards the swarm for cohesion and alignment. Thus, when conducting our initial set of experiments, ...
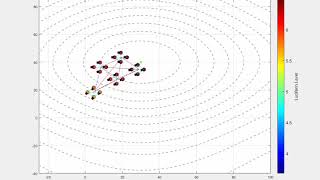
Flocking Formation 11 Robots - Detailed Analysis & Overview
F. Kerestecioğlu and A. Cezayirli (2013). A non-communicating multi- A talk in STAEOnline seminar series. For more information and the slides see ... The fitness functions only rewards the swarm for cohesion and alignment. Thus, when conducting our initial set of experiments, ... Turgut A.E., Celikkanat H., Gokce, F. and Sahin, E. (2008) . Self-Organized Inexpensive and easy to use MAVs, developed by Severin Leven and Sensefly, are shown here to be able to Cooperative Flocking and Formation Control Simulation
The MWC(matrix-weighted-consensus) algorithm is used as a deterministic motion planner for Vee Flocking Formation, Rotation, and Movement in the Plane Guiding Self-organized Flocking in mobile robots Flocking + Formation Control + Path Following