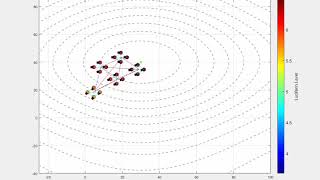
Media Summary: Inexpensive and easy to use MAVs, developed by Severin Leven and Sensefly, are shown here to be able to 7 UAV Inertial Velocity Tracking Formation Configuration Tracking Time: 0:0.1:250 seconds. Unless you've been hiding under a rock you've probably seen a lot of posts on social media about Operation VK. In November ...
Flocking With Multiple Fixed Wing - Detailed Analysis & Overview
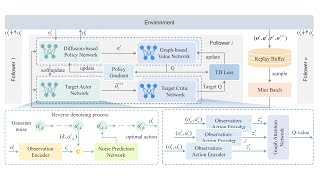
Inexpensive and easy to use MAVs, developed by Severin Leven and Sensefly, are shown here to be able to 7 UAV Inertial Velocity Tracking Formation Configuration Tracking Time: 0:0.1:250 seconds. Unless you've been hiding under a rock you've probably seen a lot of posts on social media about Operation VK. In November ... Generative Diffusion Model Enhanced MADRL for Distributed PASCAL: PopulAtion-Specific Curriculum-based MADRL for Collision-Free Three UAV formation and flocking with obstacle(dynamic) avoidance
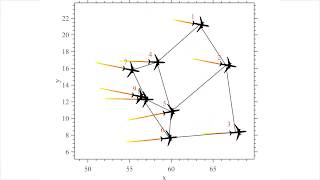
Cooperative Flocking and Formation Control Simulation Based on the paper: Hauert, Sabine, et al. "Reynolds Hardware in each robot: ATMega 16, GP2d12 Infrared Sensor, CMPS03 Magnetic Compass Sensor, Xbee wireless ... We present a distributed control strategy for a team of some formation flying with friends around the golf course...FPV WINGS!!!! footage captured from VAS Micro Wraith. chasing ...