Media Summary: Scene Flow demonstration. Software is available at: Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Unoriented LATCH descriptor and matcher running on GTX 970M with CUDA. Symmetric matches are enforced, and ~3 billion ...
Libviso Visual Odometry For Intelligent - Detailed Analysis & Overview
Scene Flow demonstration. Software is available at: Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Unoriented LATCH descriptor and matcher running on GTX 970M with CUDA. Symmetric matches are enforced, and ~3 billion ... Extracted SIFT features and reconstructed mosaic of trajectory. An appearance based method is used to estimate the rotation of ... Authors: Jiahui Huang, Sheng Yang, Tai-Jiang Mu, Shi-Min Hu Description: We present ClusterVO, a stereo An information filter based (GraphSLAM approach) for inertial aided
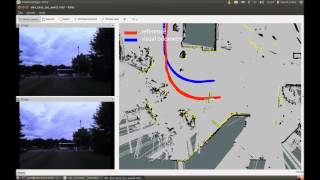
stereo-image: red = outlier matches, green = inlier matches rviz-map: red = reference, blue = stereo-vo with ICRA 2018 Spotlight Video Interactive Session Tue AM Pod O.2 Authors: Costante, Gabriele; Ciarfuglia, Thomas Alessandro Title: ... This video shows the feasibility of egomotion estimatíon via stereo