Media Summary: Video attachment for the paper B. Penin, P. Robuffo Giordano, F. Chaumette Minimum-Time Trajectory Generation Under ... video attachment for the paper F. Abi-Farraj, B. Henze, C. Ott, P. Robuffo Giordano, M. Roa Torque-Based Balancing for a ... Robot Localization Based on Aerial Images for Precision Agriculture Tasks in Crop Fields by N. Chebrolu, P. Lottes, T. Laebe, and ...
Ral Icra 19 Effective Visual - Detailed Analysis & Overview
Video attachment for the paper B. Penin, P. Robuffo Giordano, F. Chaumette Minimum-Time Trajectory Generation Under ... video attachment for the paper F. Abi-Farraj, B. Henze, C. Ott, P. Robuffo Giordano, M. Roa Torque-Based Balancing for a ... Robot Localization Based on Aerial Images for Precision Agriculture Tasks in Crop Fields by N. Chebrolu, P. Lottes, T. Laebe, and ... This video is associated with the paper: Gridseth M and Barfoot T D. “Keeping an Eye on Things: Deep Learned Features for ... Learning to See the Wood for the Trees: Deep Laser Localization in Urban and Natural Environments on a CPU Georgi Tinchev, ... Paper available here: Code available here: Authors: Jesus Tordesillas, ...
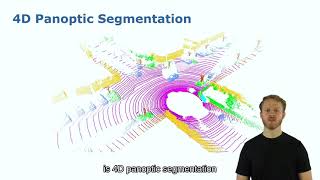
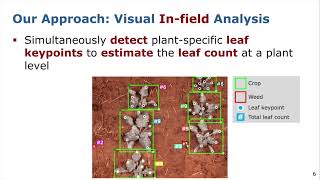
R. Marcuzzi, L. Nunes, L. Wiesmann, I. Vizzo, J. Behley, and C. Stachniss, “Contrastive Instance Association for 4D Panoptic ... J. Weyler, A. Milioto, T. Falck, J. Behley, and C. Stachniss, “Joint Plant Instance Detection and Leaf Count Estimation for In-Field ... This is the presentation video. The paper is accepted to IEEE RA-L with












![[RAL with ICRA 2021] A Motion Estimation Filter for IMU with Onboard Ferromagnetic Materials](https://i.ytimg.com/vi/OaZKEjec8UU/mqdefault.jpg)