Media Summary: ORB-SLAM3 runs on a remote laptop. The free space of the occupancy map is drawn autonomousvehicles VISUAL ODOMETRY. Explore This is a demonstration of ORB_SLAM3 performing visual
Real Time Slam Using An - Detailed Analysis & Overview
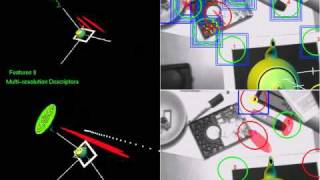
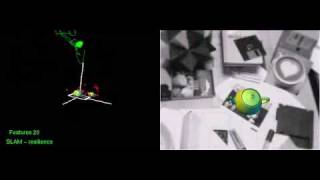
ORB-SLAM3 runs on a remote laptop. The free space of the occupancy map is drawn autonomousvehicles VISUAL ODOMETRY. Explore This is a demonstration of ORB_SLAM3 performing visual This video, produced by Andrew Davison, Nick Molton and Ian Reid demonstrates the general operation of our single camera ... Video presented in ICCVG'10 for the paper "GFT: GPU Fast Triangulation of 3D Points". More info: ... Summary of Research by Denis Chekhlov investigating resilience to erratic motion and camera kidnapping while exploring a ...
In the previous video, I built a 10km city-scale 3D LiDAR map Presented by Emanuele Vespa, Imperial College London at the Arm Research Summit 2017. Join us on 17-19 September in ...

![[CVPR 2025] MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors](https://i.ytimg.com/vi/wozt71NBFTQ/mqdefault.jpg)