Media Summary: This video provides some intuition around Pose Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ...
Slam Graph Based Slam With - Detailed Analysis & Overview
This video provides some intuition around Pose Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Welcome to TechLab ! How do robots explore unknown environments and build maps on their own? In this complete ... Giorgio Grisetti, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard A Tutorial on This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining
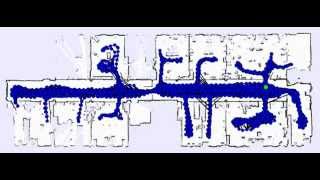
Autonomous Mobile Robots Course Chapter 12: Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ... The video shows the creation and on the fly improvement of a map using our new Final Research Challenge of Artificial Intelligence for Robotics: Online





![[GP-SLAM] Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #2)](https://i.ytimg.com/vi/72lmBUPLc84/mqdefault.jpg)