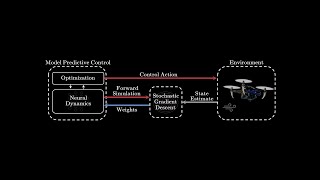
Media Summary: A large part of the success of supervised machine Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex ... Authors: Niklas Penzel, Christian Reimers, Clemens-Alexander Brust, Joachim Denzler Abstract:
Uncertainty For Active Learning On - Detailed Analysis & Overview
A large part of the success of supervised machine Model-based control requires an accurate model of the system dynamics for precisely and safely controlling the robot in complex ... Authors: Niklas Penzel, Christian Reimers, Clemens-Alexander Brust, Joachim Denzler Abstract: MIT 16.06 Principles of Automatic Control, Fall 2012 Instructor: Steven Hall View the complete course: ... Luiza Ribeiro Marnet presents her work that was published at Robovis 2024, read the full paper here: ... Recent years have witnessed a surge of successful applications of machine reading comprehension. Of central importance to the ...
Get our recent book Building LLMs for Production: The e-book version: ...












![Uncertainty-Based Active Learning for Reading Comprehension [TMLR]](https://i.ytimg.com/vi/oRrMip1MWbY/mqdefault.jpg)


