Media Summary: 48-Hour Sprint: Vision-Guided Robot Control A rapid prototype demonstrating the integration of computer vision and robotic ... eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... To bring about a new era in industrial robotics by overcoming challenges such as high costs, restrictive environment, and safety ...
Visual Servoing Real Time Dynamic - Detailed Analysis & Overview
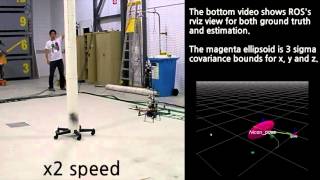
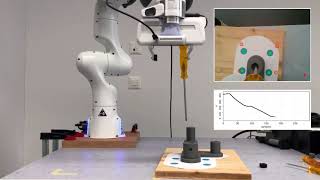
48-Hour Sprint: Vision-Guided Robot Control A rapid prototype demonstrating the integration of computer vision and robotic ... eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... To bring about a new era in industrial robotics by overcoming challenges such as high costs, restrictive environment, and safety ... Close-quarters quadrotor flying using Position-based Redwire's STAARK robotic arm is now capable of autonomously tracking and grasping Advanced controls and image-based robotic tracking. Details at H. Xiao and X. Chen.
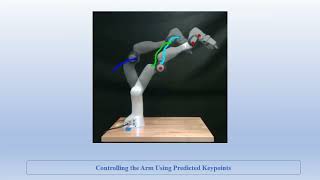
Abstract: In this work, we propose a novel image based Today robots must be adaptive and easy to use. Users want them to realize stable and complex tasks without explicitly ... I made my 6 months end-of-study internship at Pollen Robotics, Bordeaux (FR) where I worked on Reachy, an humanoid robot ... Puma 560 Visual Servoing - Real-Time Tracking 6D Image-based Dynamic Visual Servoing for Robot Manipulators with Uncalibrated Stereo Cameras This video is a supplementary material for the following paper: Keypoints-Based Adaptive
Bringing robotics and vision together! This video demonstrates an innovative control technique where a camera, mounted on a ...