Media Summary: Complementary filtering for height estimation and control of a drone Find all of my other videos here: Get the map of control theory: ... Check out the other videos in this series: Part 1 - What Is Sensor Fusion?: Part 2 - Fusing an Accel, ...
Complementary Filtering For Height Estimation - Detailed Analysis & Overview
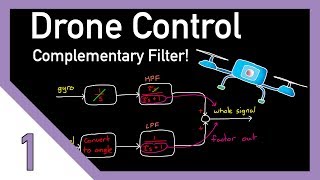
Complementary filtering for height estimation and control of a drone Find all of my other videos here: Get the map of control theory: ... Check out the other videos in this series: Part 1 - What Is Sensor Fusion?: Part 2 - Fusing an Accel, ... In this lesson then we're going to apply the Complementary Filter of angle measurements Sensors -- I2C-- Arduino --Uart-- PC -- CSV file -- FreeMat -- attitude
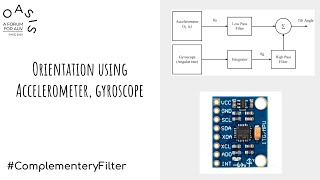
Here the data from the IMU (gyro and accelerometer) are used to get the orientation of the phone and to visualize it on Rviz. This is a simple example of some of the stufff I've been working on recently. This is a demonstration of the soon to be released ... Efficiently learn the fundamentals of state This board Mariano Lizarraga and I built is tracking the attitude quaternion and the MEMS gyro biases using a Kalman Part 2 of sensor fusion video series showing theory and implementation of the