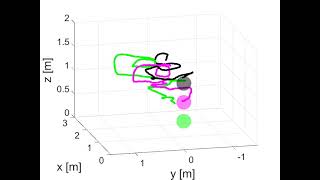
Media Summary: This is a simulation and experimental video of Gas Source Localization in Unknown Indoor Environments Using Dual-Mode Information-Theoretic Search The video demonstrates a navigation system and exploration strategy for a multi-robot system with the goal to find
Gas Source Localization In Unknown - Detailed Analysis & Overview
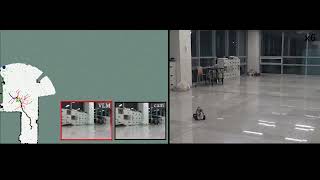
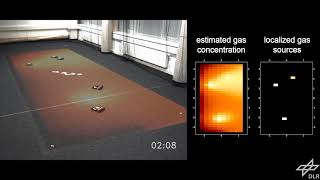
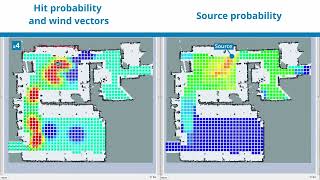
This is a simulation and experimental video of Gas Source Localization in Unknown Indoor Environments Using Dual-Mode Information-Theoretic Search The video demonstrates a navigation system and exploration strategy for a multi-robot system with the goal to find Semantically Guided Gas Source Localization in Complex Unknown Indoor Environment via VLM Gas Source Localization in Complex Unknown Indoor Environment Using a Hierarchical Planner The five robots cooperatively explore a simulated dynamic
Video demo of paper "Deep Learning Based Topography Aware Increasing threats of the leaks of different This video is the accompany video of the paper "Sense in Motion with Belief Clustering: Efficient Paper title: Palm-Sized Quadcopter for Three-Dimensional Chemical Plume Tracking DOI: 10.1109/TIM.2022.3218316. This is a short video for our IROS2020 paper. More details can be found in the paper. A presentation for the American Geophysical Union annual fall meeting on the application of robotic multi-sensor 3D Mapping for ...
Accepted as a journal paper at IEEE Robotics and Automation Letters (RA-L)